Implied Scenarios
With the sequence diagrams, we describe scenarios, that means, specific and selected examples of the system interactions. Some diagrams cover several scenarios. In most cases, a specification (a set of diagrams) does not document all possible scenarios. This is because it is often not practical to write down all scenarios, and especially when sketching a system it may not be relevant to think about all scenarios right at the beginning.
Once a system specification gets more mature, you need to also develop an understanding how the system handles scenarios that your specification does not explicitly document yet. These scenarios often exist because reality is more complicated than an idealized interaction.
Of course, you could just not care and leave the choice about details to the developer who implements the system. In fact, this is what often happens. However, this is not what you want. This may cause bugs in the system, cost a lot of time of fixing afterwards and in general leads to surprises later on. (And if there is one thing we want to prevent, it is surprises.)
Message Loss
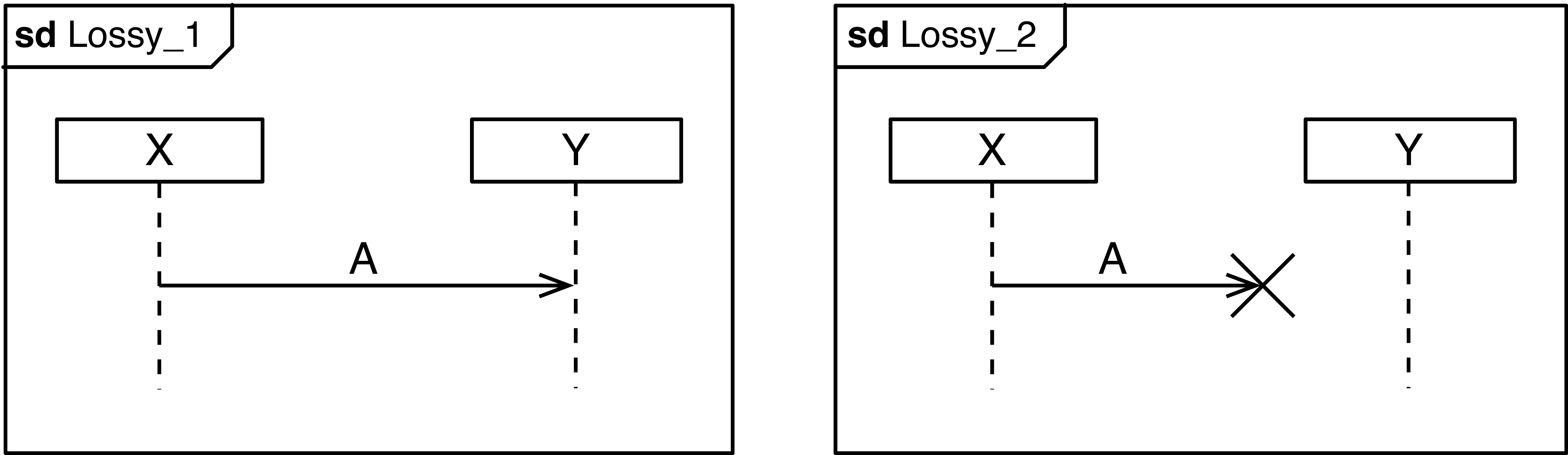
Communication protocols provide different guarantees to the application regarding the delivery of messages. However, even the most sophisticated protocol cannot prevent that a communication link is failing and never recovers. In these cases, the protocol cannot "hide" the problem from the application, and the application itself needs to handle the situation. The scenario Lossy_1 for instance also implies scenario Lossy_2, i.e., that the message is not received. The loss of a message is written with a big cross.
So, whenever there is a diagram in which a message is sent, we should check what would happen if this message got lost. Here are some possible alternatives:
-
The application is fine even if message
Ais lost. This can be the case, for instance, if messageAis one (of many) messages of the same type that are sent periodically, and where it does not matter if some of them get lost. A sensor that repeatedly sends some measurements is a typical example. (It may be, however, important that the sensor message eventually is sent, i.e., not all of them are lost. -
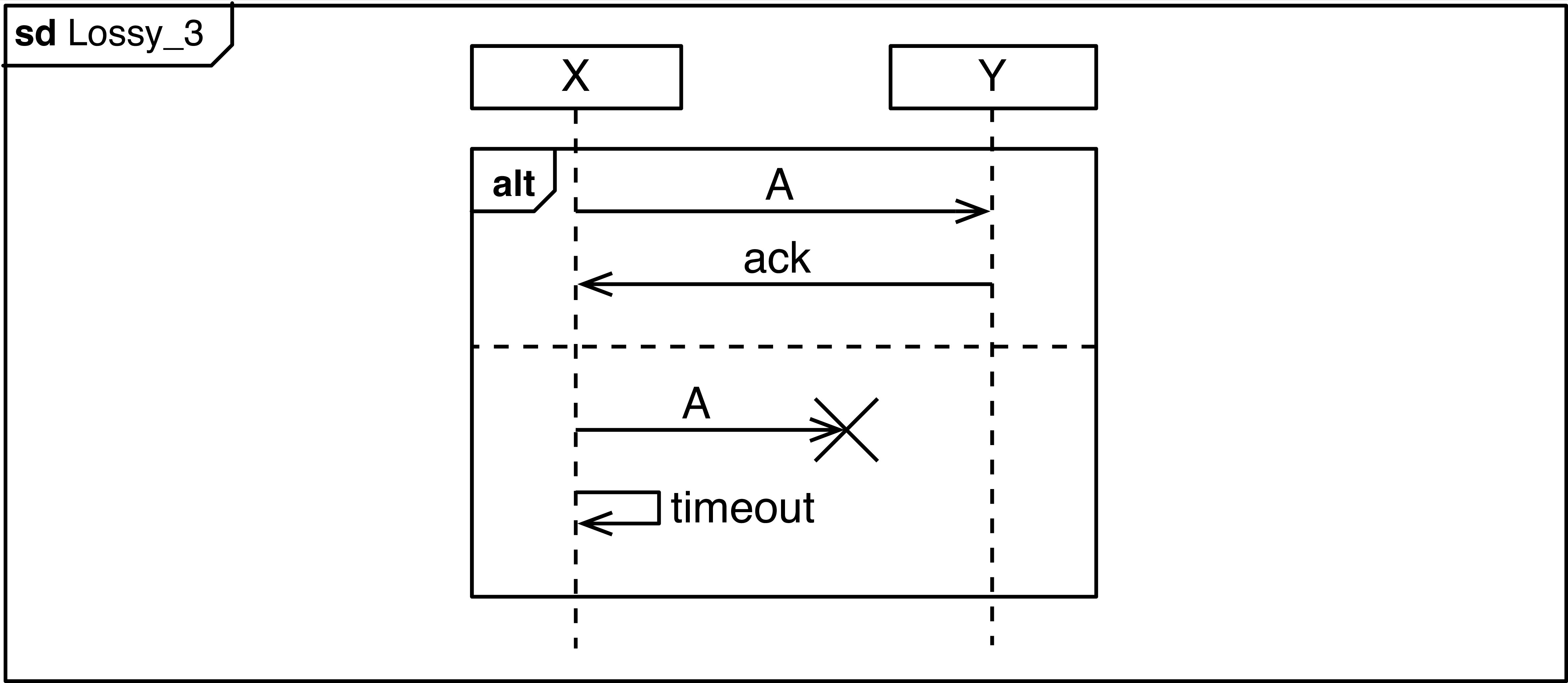
The most common solution is to use acknowledgment messages. This is illustrated in Lossy_3. In case message
Ais lost,Ydoes not send an acknowledgement. This is detected byXindirectly, through the expiration of a timer. We show the timer here as a message ofXto itself.
Non-Causal Orderings
The diagram below shows an interaction between parts in a movie ticket system. At the end of the purchase process, the terminal sends a pay message to the payment component. The payment component then forwards pay_ok to the ticket printer. The terminal sends the movie selection to the printer. The printer then prints the tickets. We ignore the case that the payment fails.
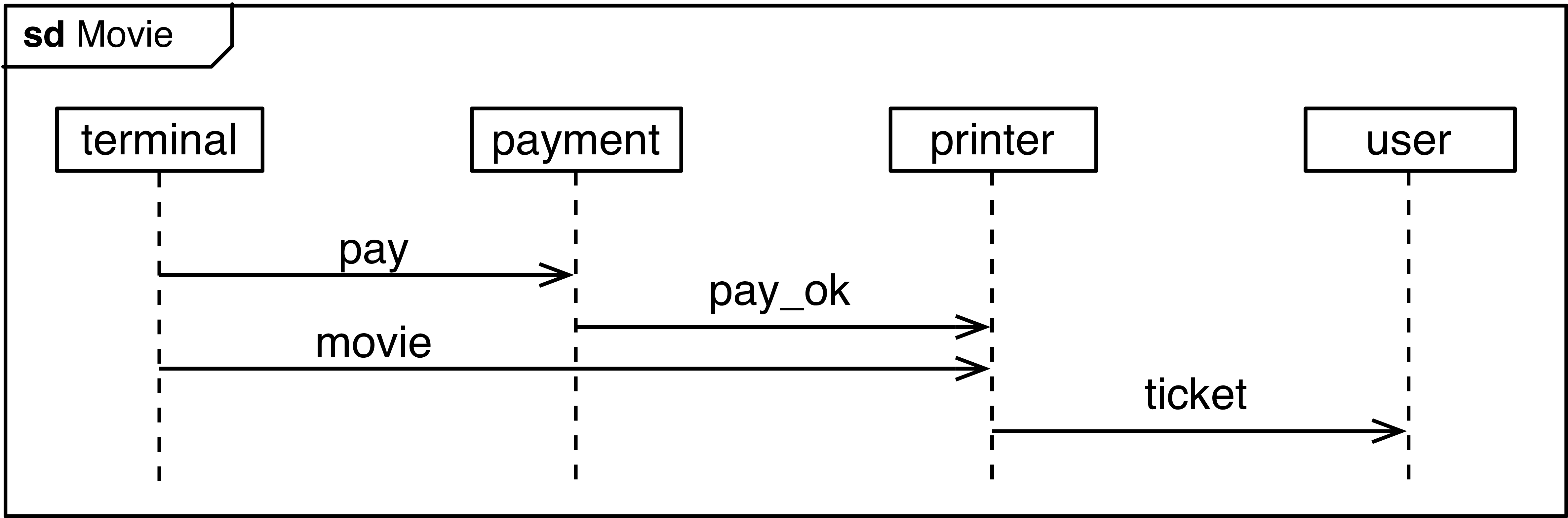
This specification has a trouble spot. The diagram indicates that the movie message is received after the pay_ok message. In a real system, we often have little control on the delay of message transfer. The payment process within payment may also take different amounts of time. In a real system it is therefore difficult, undesirable or even impossible to ensure that movie is received after pay_ok.
One way to fix this situation is with a co-region as in Movie Fix 1, to express explicitly that the two signals can arrive at the printer in any order. The implementation of the printer must then take care of this.
Another way is to change the way the entire interaction works. Instead of sending pay_ok to the printer, the payment component may also return it to the terminal, shown in Movie Fix 2. The terminal can then send the movie message after the payment is confirmed. In this case, we may also use a synchronous message for the payment as in Movie Fix 2x, since the terminal may anyways be waiting for it and not do anything else.
Note: The original sequence diagram is not wrong, but depending on the context, type of system and the subsequent development process and implementation, the non-causal ordering of the events may be a source of trouble.

Mixed Initiatives
Consider the following alarm system. A sensor may detect an alarm and send message alarm to a subscriber. The subscriber may then confirm the alarm via message confirm. The alarm can also be stopped by the sensor via stop. This is shown in the two diagrams below.

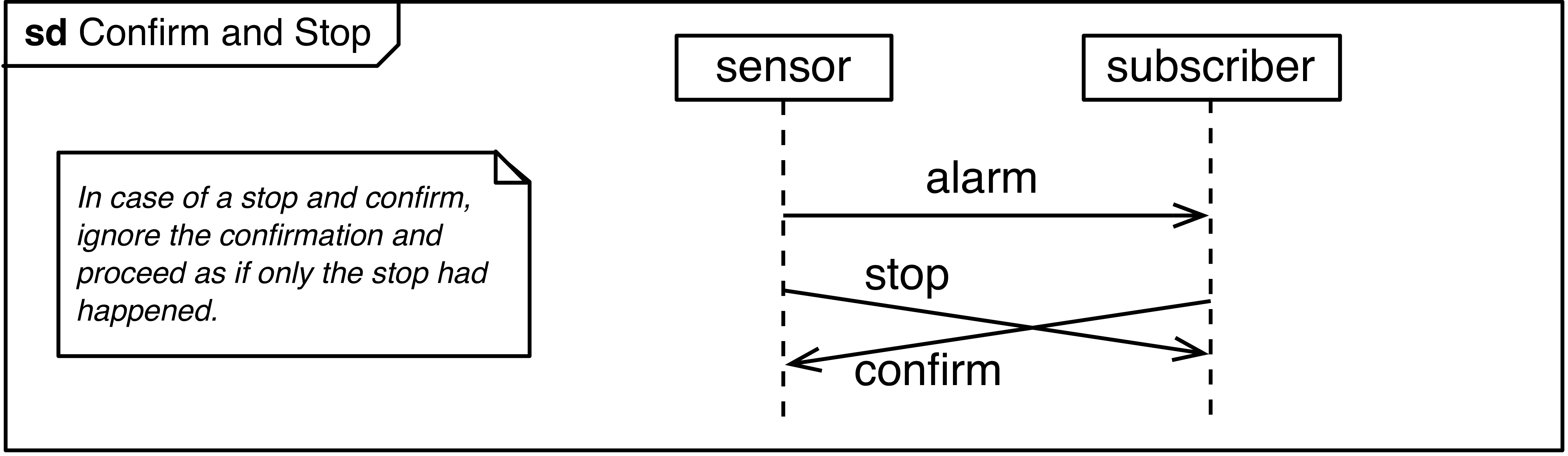
The two different scenarios seem pretty straight-forward. However, these two scenarios imply a third one: What should happen, if the alarm is stopped by the sensor, but the subscriber confirms it, right before it receives the stop message? We call this scenario a mixed initiative, since it involves a situation where several participants may take initiative and send a message. This situation may seem like a rare coincidence, but it is only a matter of time and you will observe this situation. We can illustrate it in another diagram:

So what to do about this? If you only provide the sequence diagrams above, it is not clear how an implementation should respond in this situation, i.e., when an alarm is both confirmed and canceled. In this case, you need to find out what the application should do. Depending on what kind of alarm it is, the stopping may overrule the confirmation, or vice versa. The diagram Confirm and Stop shows one way to address the mixed initiative, using a simple comment.